
概述篇
LCA (Least Common Ancestors) ,即最近公共祖先,是指这样的一个问题:在一棵有根树中,找出某两个节点 u 和 v 最近的公共祖先。
LCA 可分为在线算法与离线算法
- 在线算法:指程序可以以序列化的方式一个一个处理输入,也就是说在一开始并不需要知道所有的输入。
- 离线算法:指一开始就需要知道问题的所有输入数据,而在解决一个问题后立即输出结果。
算法篇
对于该问题,很容易想到的做法是从 u、v 分别回溯到根节点,然后这两条路径中的第一个交点即为 u、v 的最近公共祖先,在一棵平衡二叉树中,该算法的时间复杂度可以达到 $O(\log n)$ ,但是对于某些退化为链状的树来说,算法的时间复杂度最坏为 $O(n)$ ,显然无法满足更高频率的查询。
本节将介绍几种比较高效的算法来解决这一问题,常见的算法有三种:在线 DFS + ST 算法、倍增算法、离线 Tarjan 算法。
接下来我们来一一解释这三种 /* 看似高深,其实也不简单 */ 的算法。
前方多图么?千千也不知道,要不要发出警告呢?(;′⌒`) (逃
在线 DFS + ST 算法
首先看到 ST 你会想到什么呢?(脑补许久都没有想到它会是哪个单词的缩写)
看过前文 『数据结构』RMQ 问题 的话你便可以明白 ST算法 的思路啦~
So ,关于 LCA 的这种在线算法也是可以建立在 RMQ 问题的基础上咯~
我们设 LCA(T,u,v) 为在有根树 T 中节点 u、v 的最近公共祖先, RMQ(A,i,j) 为线性序列 A 中区间 [i,j] 上的最小(大)值。
如下图这棵有根树:
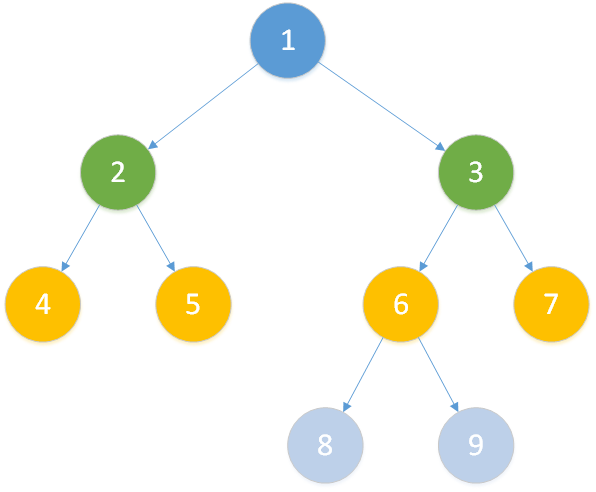
我们令节点编号满足父节点编号小于子节点编号(编号条件)
可以看出 LCA(T,4,5) = 2, LCA(T,2,8) = 1, LCA(T,3,9) = 3 。
设线性序列 A 为有根树 T 的中序遍历,即 A = [4,2,5,1,8,6,9,3,7] 。
由中序遍历的性质我们可以知道,任意两点 u、v 的最近公共祖先总在以该两点所在位置为端点的区间内,且编号最小。
举个栗子:
假设 u = 8, v = 7 ,则该两点所确定的一段区间为 [8,6,9,3,7] ,而区间最小值为 3 ,也就是说,节点 3 为 u、v 的最近公共祖先。
解决区间最值问题我们可以采用 RMQ 问题中的 ST 算法 。
但是在有些问题中给出的节点并不一定满足我们所说的父节点编号小于子节点编号,因此我们可以利用节点间的关系建图,然后采用前序遍历来为每一个节点重新编号以生成线性序列 A ,于是问题又被转化为了区间最值的查询,和之前一样的做法咯~
时间复杂度: $n×O(\log n)$ 预处理 + $O(1)$ 查询
想了解 RMQ 问题 的解法可以戳上面的链接哦~
以上部分介绍了 LCA 如何转化为 RMQ 问题,而在实际中这两种方案之间可以相互转化
类比之前的做法,我们如何将一个线性序列转化为满足编号条件的有根树呢?
- 设序列中的最小值为 $A_k$ ,建立优先级为 $A_k$ 的根节点 $T_k$
- 将 $A[1…k-1]$ 递归建树作为 $T_k$ 的左子树
- 将 $A[k+1…n]$ 递归建树作为 $T_k$ 的右子树
读者可以试着利用此方法将之前的线性序列 A = [4,2,5,1,8,6,9,3,7] 构造出有根树 T ,结果一定满足之前所说的编号条件,但却不一定唯一。
离线 Tarjan 算法
Tarjan 算法是一种常见的用于解决 LCA 问题的离线算法,它结合了深度优先搜索与并查集,整个算法为线性处理时间。
首先来介绍一下 Tarjan 算法的基本思路:
- 任选一个节点为根节点,从根节点开始
- 遍历该点 u 的所有子节点 v ,并标记 v 已经被访问过
- 若 v 还有子节点,返回 2 ,否则下一步
- 合并 v 到 u 所在集合
- 寻找与当前点 u 有询问关系的点 e
- 若 e 已经被访问过,则可以确定 u、e 的最近公共祖先为 e 被合并到的父亲节点
伪代码:
Tarjan(u) // merge 和 find 为并查集合并函数和查找函数
{
for each(u,v) // 遍历 u 的所有子节点 v
{
Tarjan(v); // 继续往下遍历
merge(u,v); // 合并 v 到 u 这一集合
标记 v 已被访问过;
}
for each(u,e) // 遍历所有与 u 有查询关系的 e
{
if (e 被访问过)
u, e 的最近公共祖先为 find(e);
}
}
感觉讲到这里已经没有其它内容了,但是一定会有好多人没有理解怎么办呢?
即使千千不想画那么多那么多的图,但还是先发出之前所说的警告 (☆▽☆)
我们假设在如下树中模拟 Tarjan 过程(节点数量少一点可以画更少的图o( ̄▽ ̄)o)
存在查询: LCA(T,3,4)、LCA(T,4,6)、LCA(T,2,1) 。
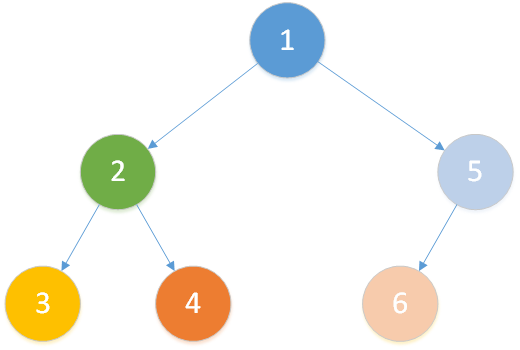
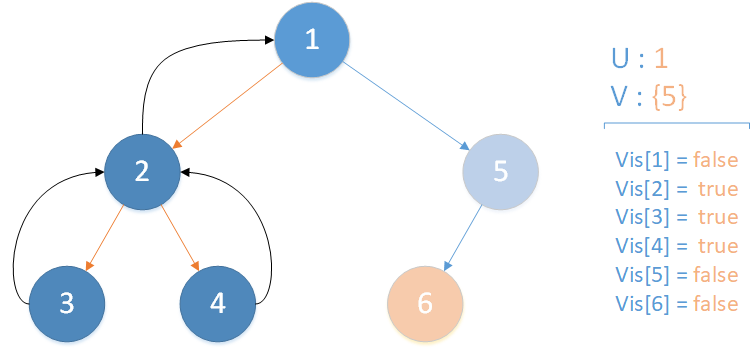
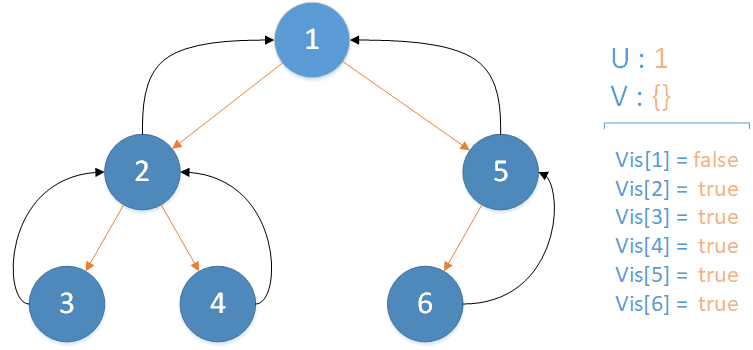
注意:每个节点的颜色代表它当前属于哪一个集合,橙色线条为搜索路径,黑色线条为合并路径。
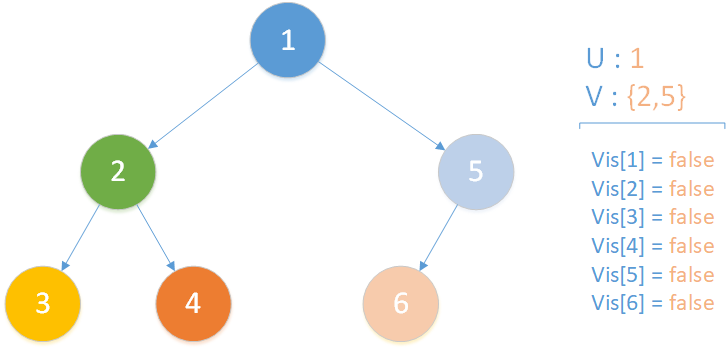
当前所在位置为 u = 1 ,未遍历孩子集合 v = {2,5} ,向下遍历。
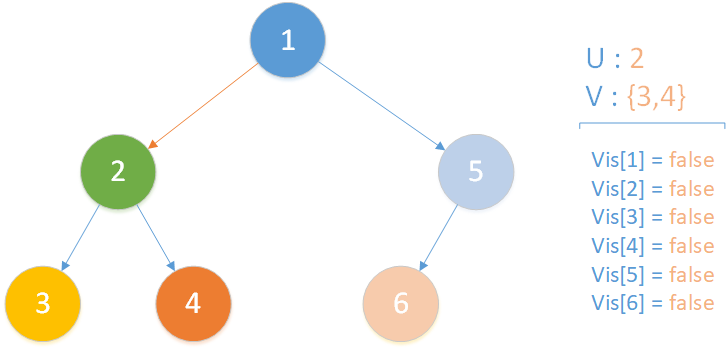
当前所在位置为 u = 2 ,未遍历孩子集合 v = {3,4} ,向下遍历。
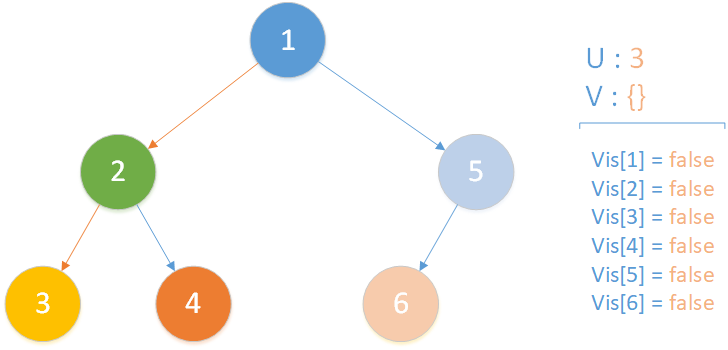
当前所在位置为 u = 3 ,未遍历孩子集合 v = {} ,递归到达最底层,遍历所有相关查询发现存在 LCA(T,3,4) ,但是节点 4 此时标记未访问,因此什么也不做,该层递归结束。
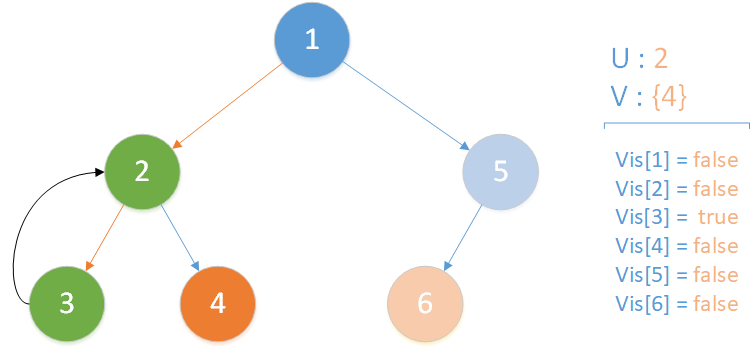
递归返回,当前所在位置 u = 2 ,合并节点 3 到 u 所在集合,标记 vis[3] = true ,此时未遍历孩子集合 v = {4} ,向下遍历。
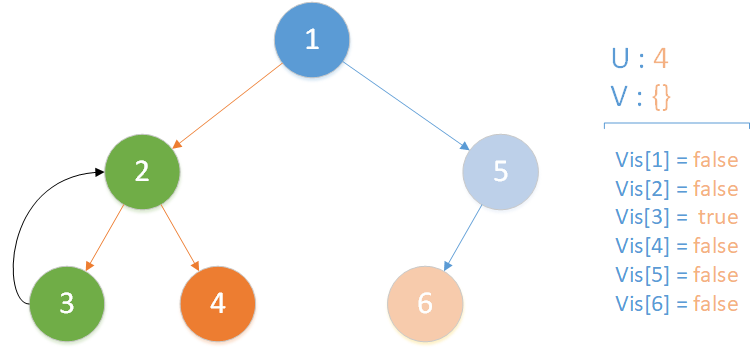
当前所在位置 u = 4 ,未遍历孩子集合 v = {} ,遍历所有相关查询发现存在 LCA(T,3,4) ,且 vis[3] = true ,此时得到该查询的解为节点 3 所在集合的首领,即 LCA(T,3,4) = 2 ;又发现存在相关查询 LCA(T,4,6) ,但是节点 6 此时标记未访问,因此什么也不做。该层递归结束。
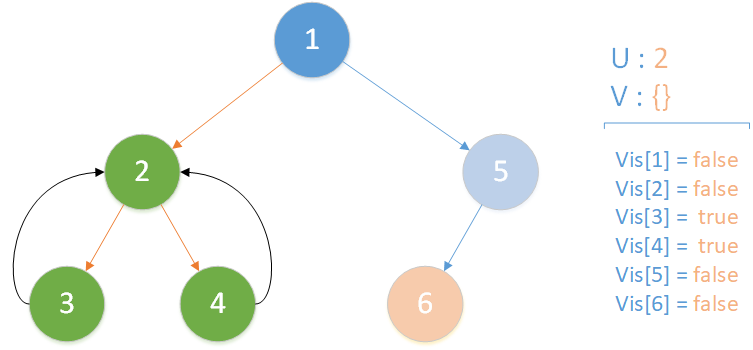
递归返回,当前所在位置 u = 2 ,合并节点 4 到 u 所在集合,标记 vis[4] = true ,未遍历孩子集合 v = {} ,遍历相关查询发现存在 LCA(T,2,1) ,但是节点 1 此时标记未访问,因此什么也不做,该层递归结束。
递归返回,当前所在位置 u = 1 ,合并节点 2 到 u 所在集合,标记 vis[2] = true ,未遍历孩子集合 v = {5} ,继续向下遍历。
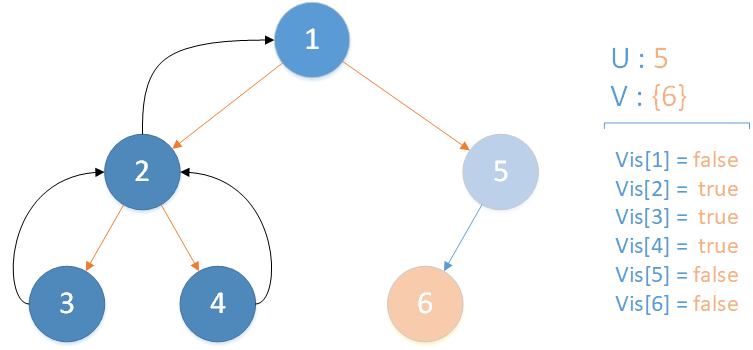
当前所在位置 u = 5 ,未遍历孩子集合 v = {6} ,继续向下遍历。
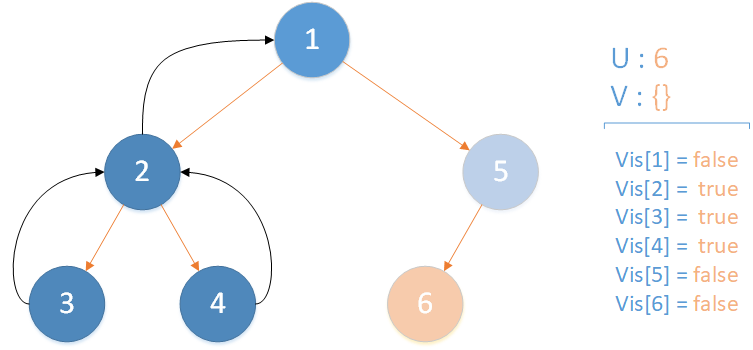
当前所在位置 u = 6 ,未遍历孩子集合 v = {} ,遍历相关查询发现存在 LCA(T,4,6) ,且 vis[4] = true ,因此得到该查询的解为节点 4 所在集合的首领,即 LCA(T,4,6) = 1 ,该层递归结束。
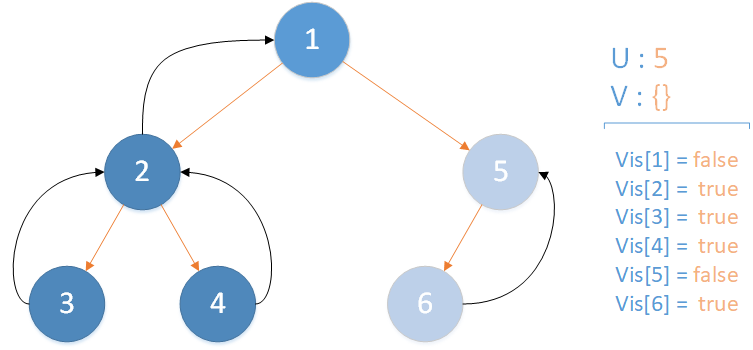
递归返回,当前所在位置 u = 5 ,合并节点 6 到 u 所在集合,并标记 vis[6] = true ,未遍历孩子集合 v = {} ,无相关查询因此该层递归结束。
递归返回,当前所在位置 u = 1 ,合并节点 5 到 u 所在集合,并标记 vis[5] = true ,未遍历孩子集合 v = {} ,遍历相关查询发现存在 LCA(T,2,1) ,此时该查询的解便是节点 2 所在集合的首领,即 LCA(T,2,1) = 1 ,递归结束。
至此整个 Tarjan 算法便结束啦~
PS:不要在意最终根节点的颜色和其他节点颜色有一点点小小差距,可能是千千在染色的时候没仔细看,总之就这样咯~
PPS:所谓的首领就是、就是首领啦~
倍增算法
哇!还有一个倍增算法以后继续补充吧!
总结篇
对于不同的 LCA 问题我们可以选择不同的算法。
假若一棵树存在动态更新,此时离线算法就显得有点力不从心了,但是在其他情况下,离线算法往往效率更高(虽然不能保证得到解的顺序与输入一致,不过我们有 sort 呀)
总之,喜欢哪种风格的 code 是我们自己的意愿咯~
另外, LCA 和 RMQ 问题是两个非常基础的问题,很多复杂问题都可以转化为这两类问题来解决。(当然这两类问题之间也可以相互转化啦~)



Pingback: LeetCode 周赛 341 场,模拟 / 树上差分 / Tarjan 离线 LCA / DFS | 呱唧呱唧网
Pingback: LeetCode 周赛 341 场,模拟 / 树上差分 / Tarjan 离线 LCA / DFS - CodeUUU
千千大佬,请问一下图片是用什么软件制作的
用 Visio 画的|´・ω・)ノ
图片和排版都超好看。
嗯呢嗯呢,谢谢啦~
千千大佬,文章写的很好,最近学习算法,我能抱走吗
当然呀~ 附上原文链接就可以啦~